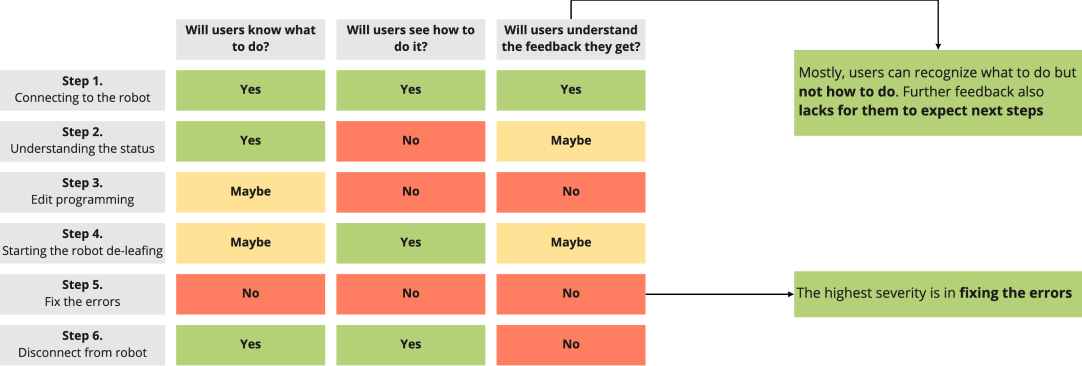
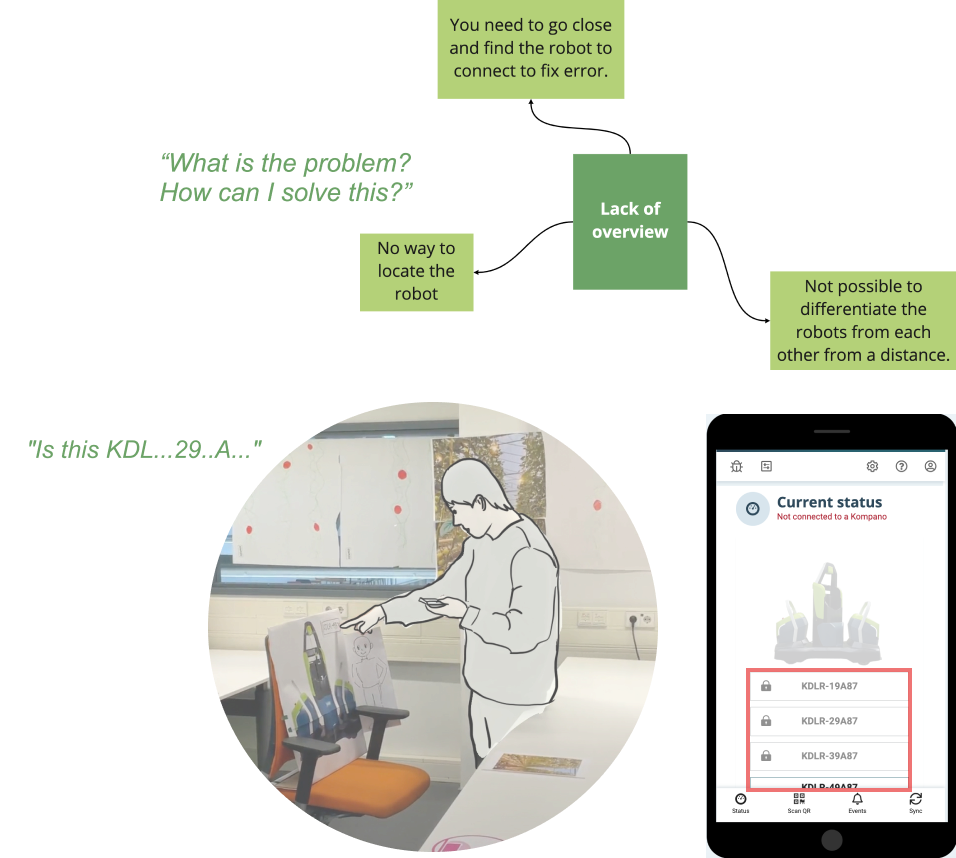
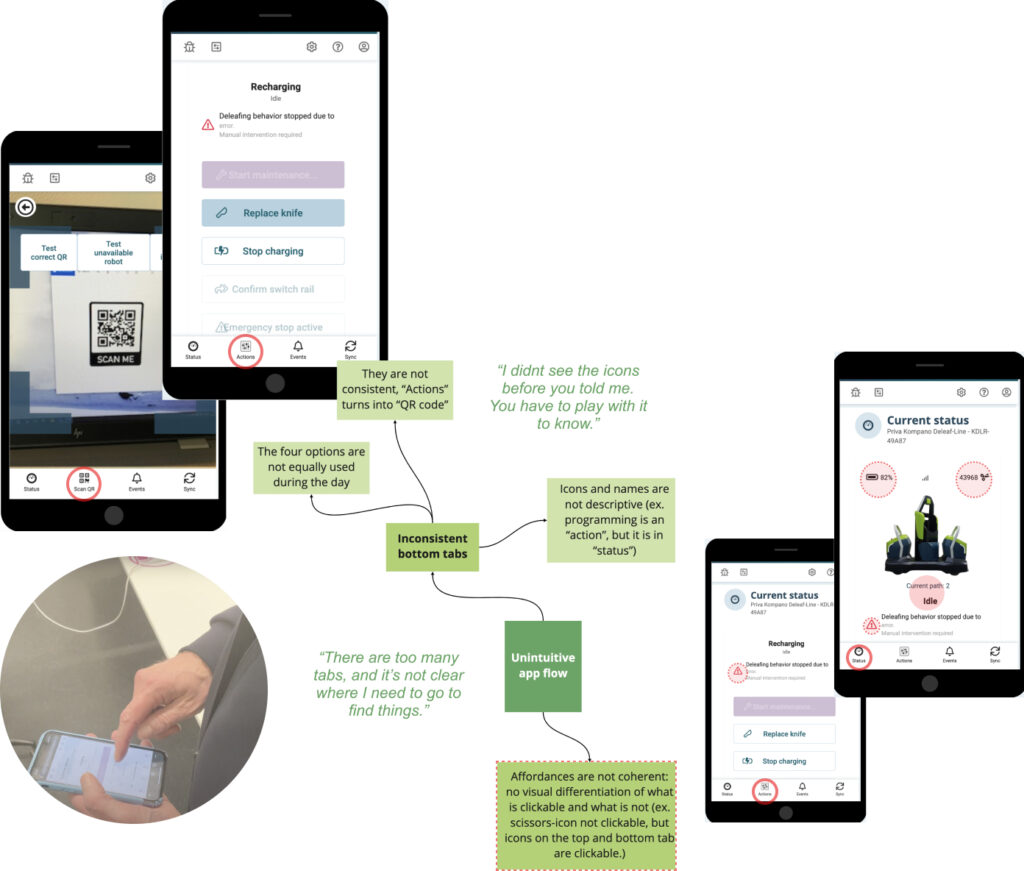
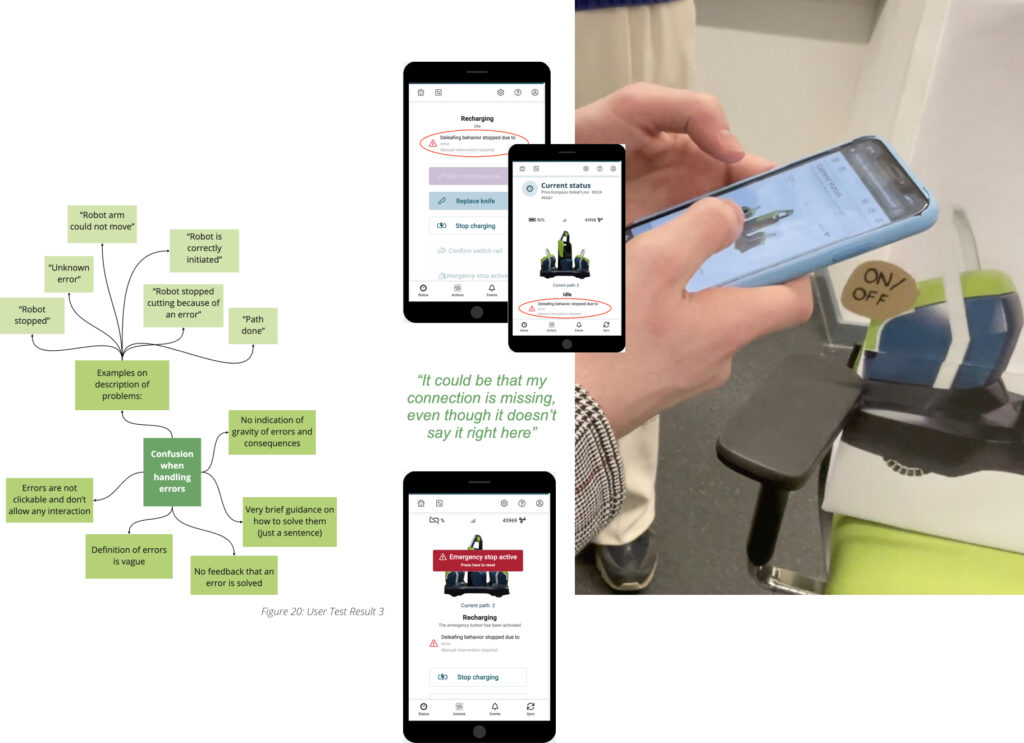
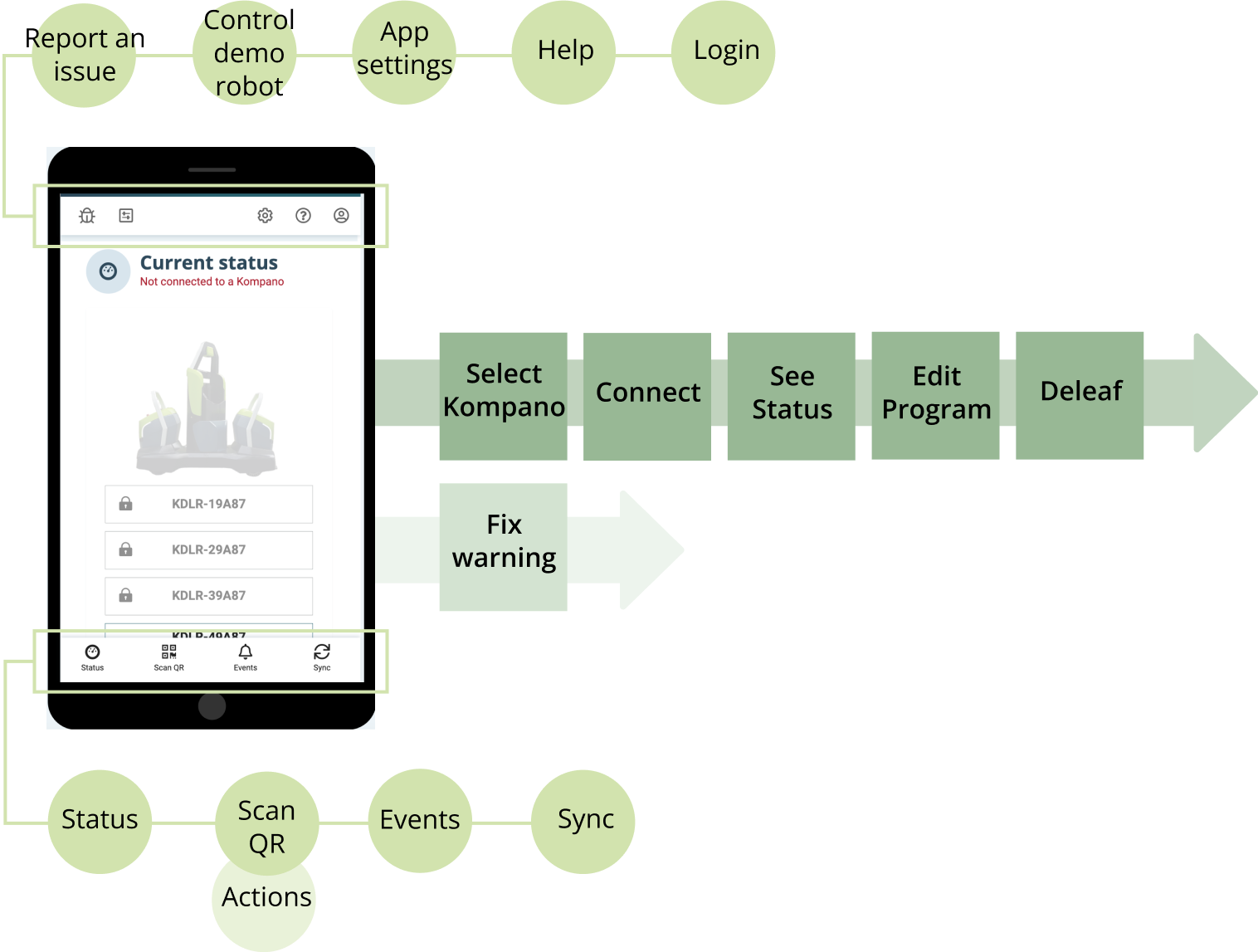
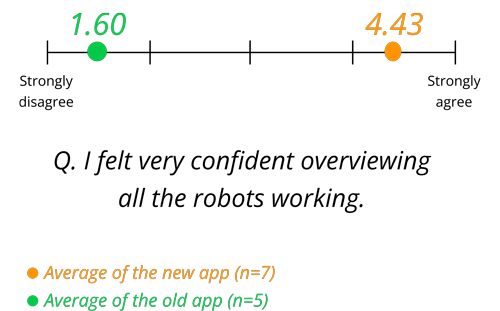
Our team evaluated the usability of the current Kompano Mobile App and identified the main problem that the operator lacks an overview of the tasks to be done and how the functions of the app work, which leads to a feeling of lacking control.
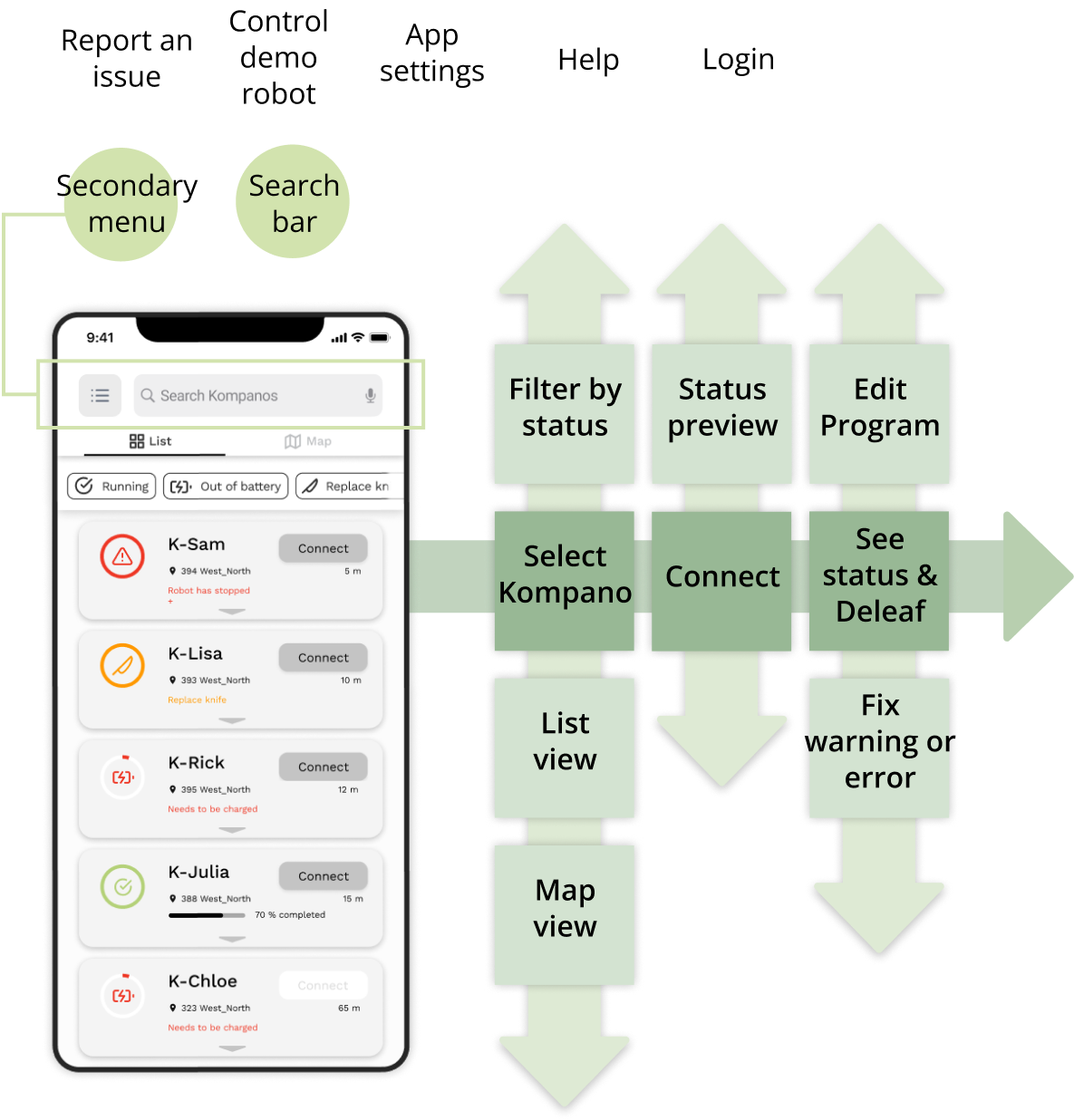
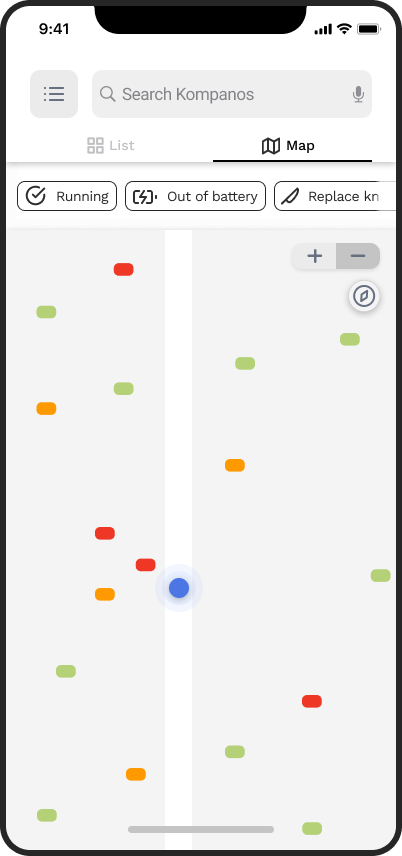
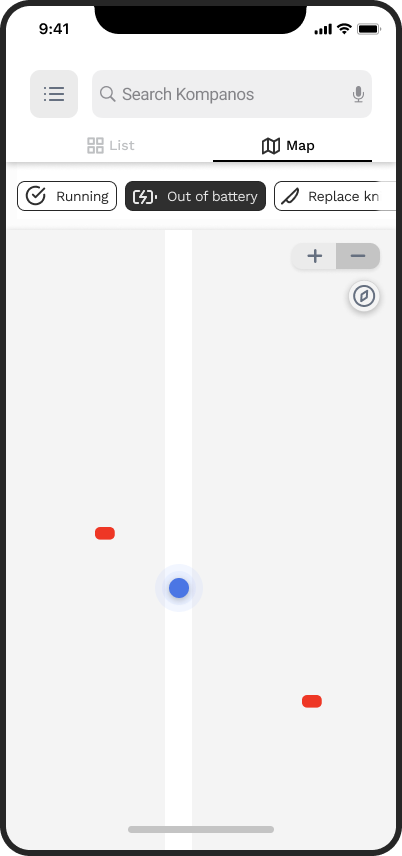
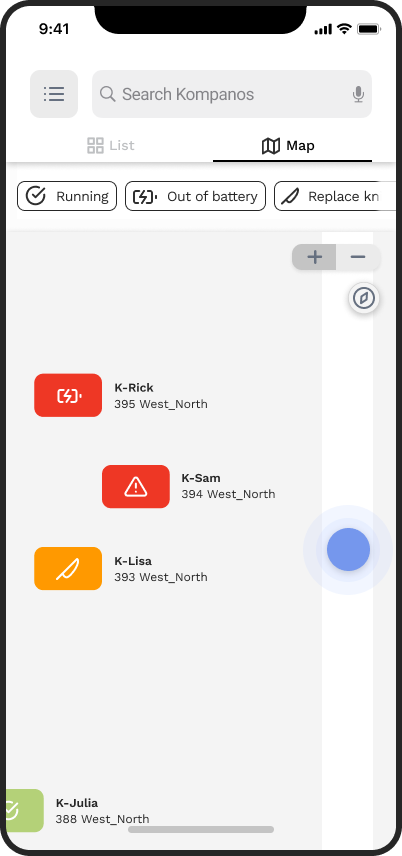
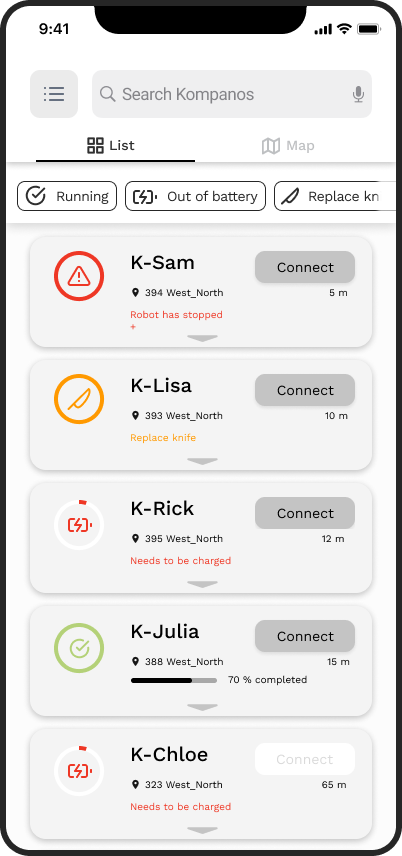
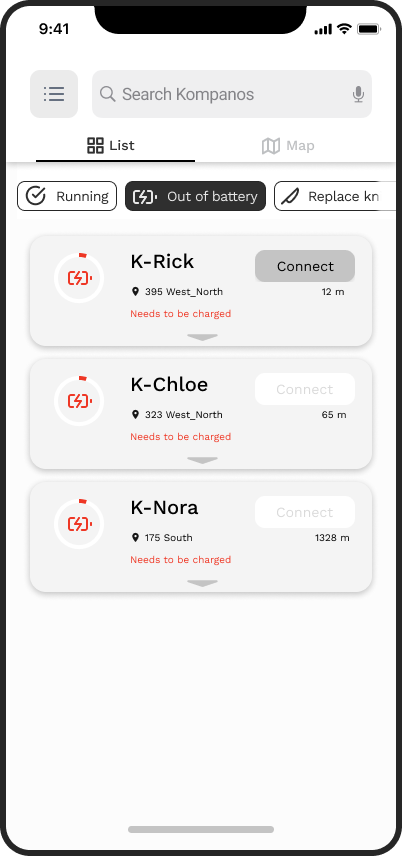
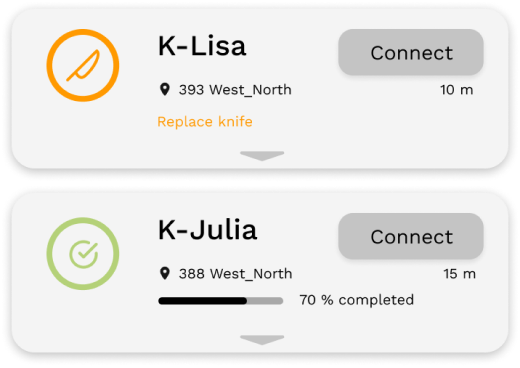
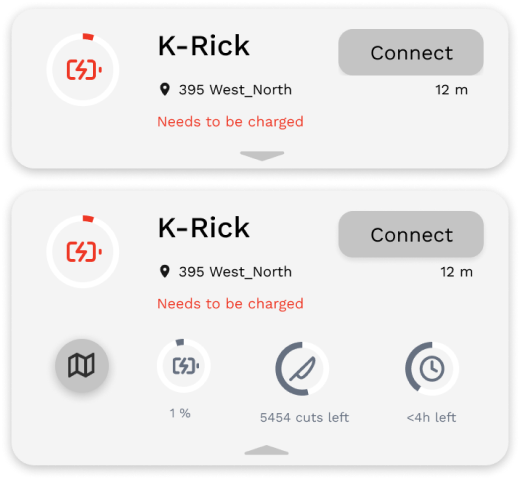
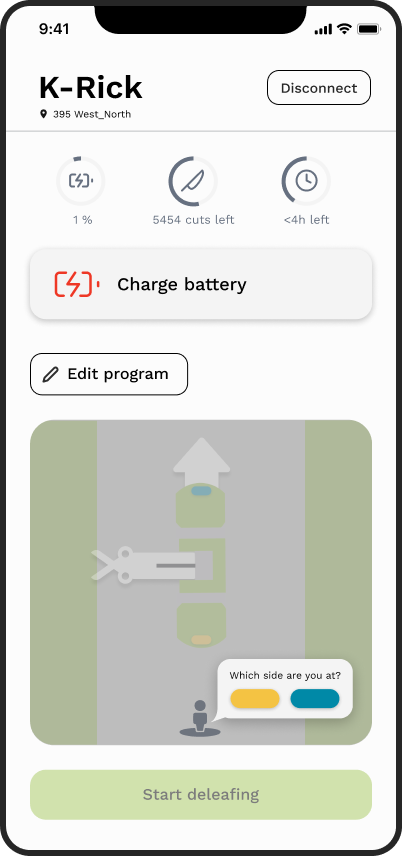
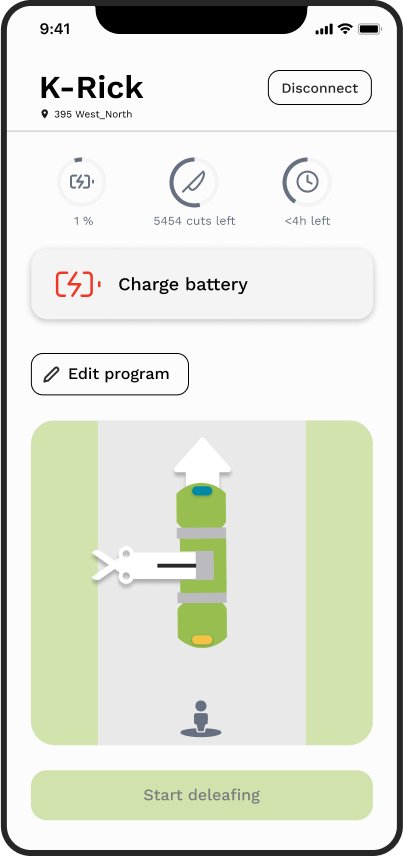
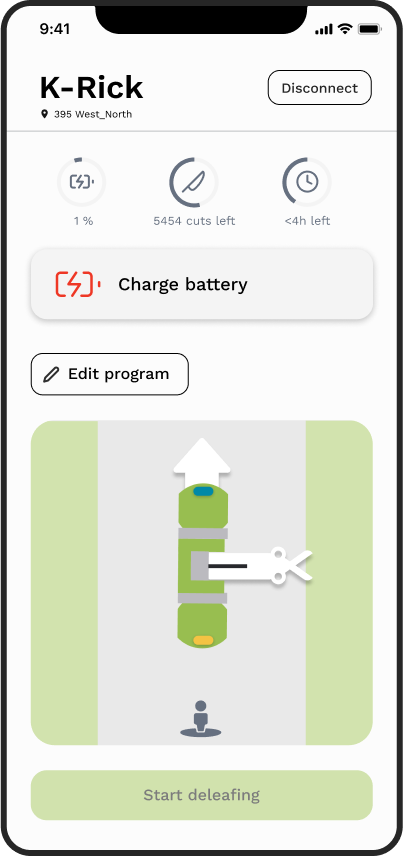
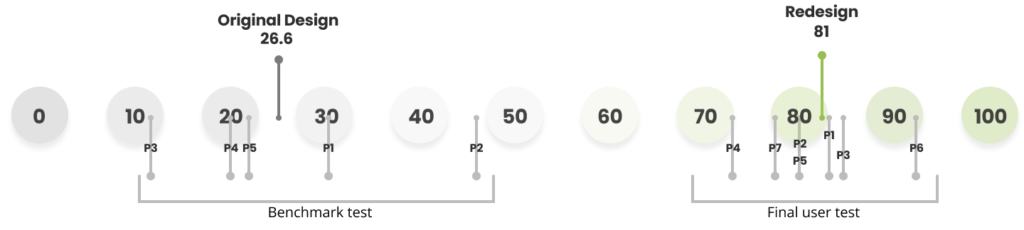
We redesigned the app to provide operators with a clearer overview of the location and status of all active robots. Testing the redesign against the old design resulted in a significant 54.4-point improvement in the System Usability Scale (SUS) score. Users also completed tasks, on average, 20.6% faster with the redesigned app compared to the original.

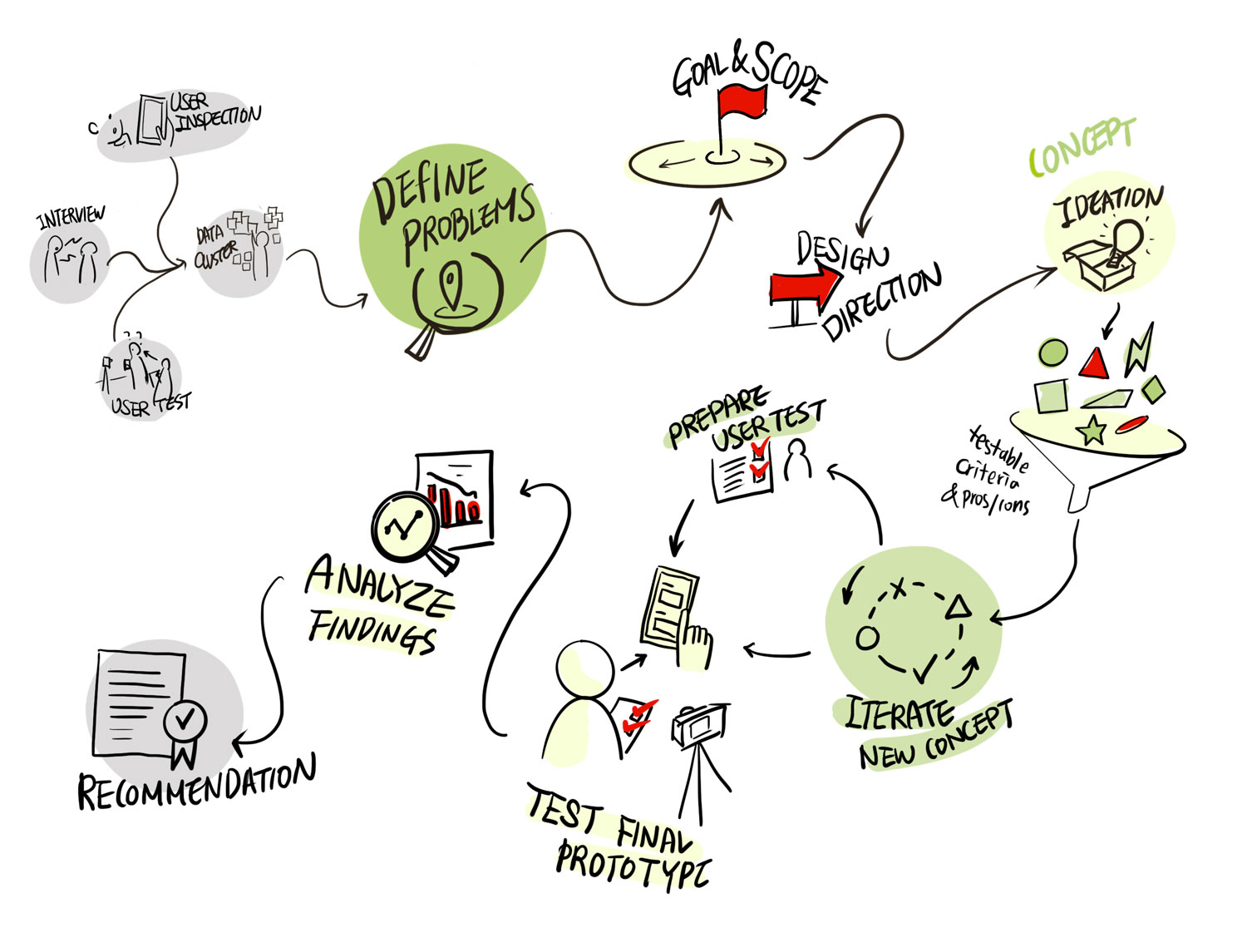
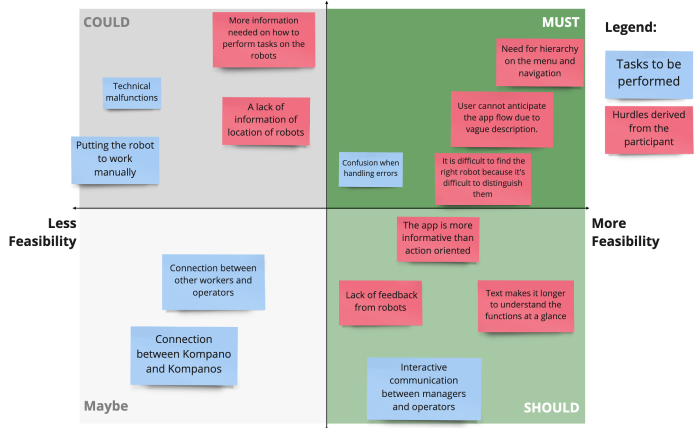
 Analyze data and draw insights
Analyze data and draw insights Visualize problems with storyboards
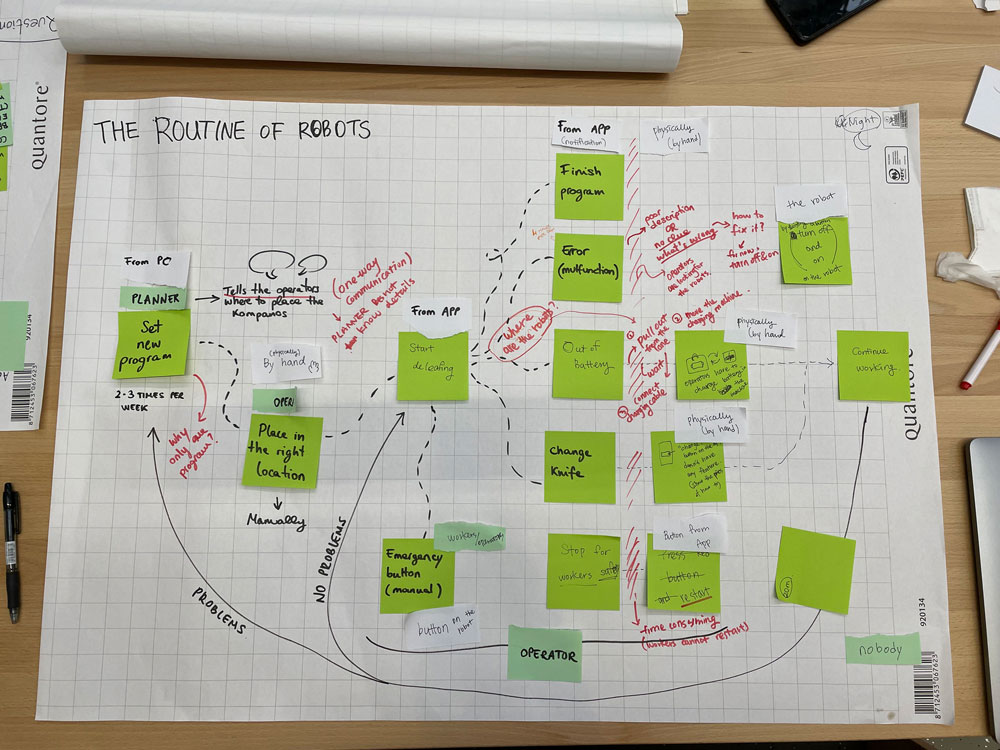
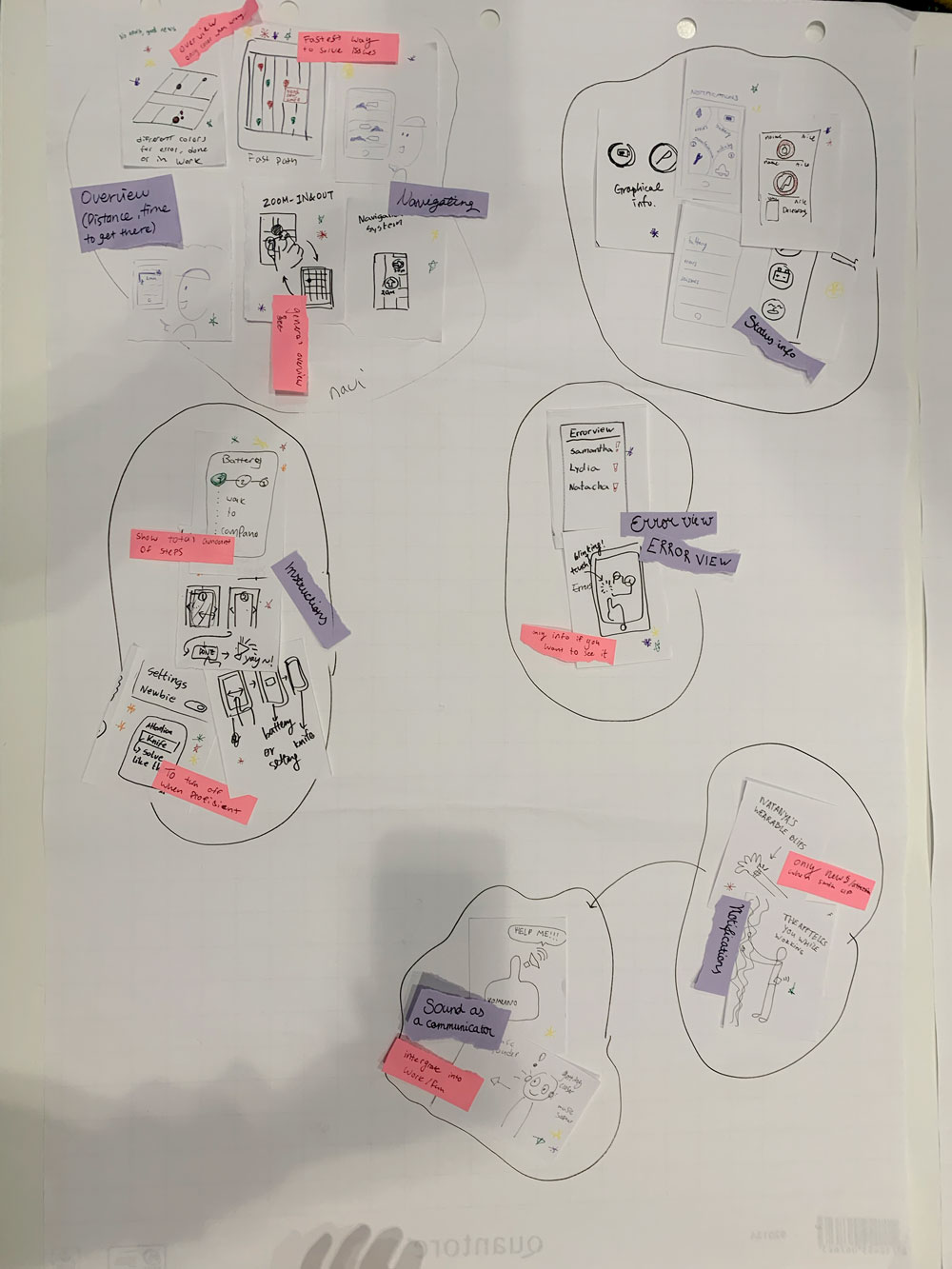
Visualize problems with storyboards Ideate interaction concepts
Ideate interaction concepts Prototype a new design with Figma
Prototype a new design with Figma Structure the project’s logics for reports, questioning “why.”
Structure the project’s logics for reports, questioning “why.”